 029-87318220
029-87318220
起重提升行业
变频器在起重机上的应用

案例详情
概述
目前ABB 有两套变频器系统,配置带防摇功能的提升软件,应
用于汕尾垃圾电厂的垃圾吊项目。该系统最大提升重量为10 吨,
提升速度:上升45 米/ 分钟,下降60 米/ 分钟;大车速度60
米/ 分钟;小车速度50 米/ 分钟。
由于特别在抓取垃圾堆场角落的垃圾时,要控制抓斗的摆幅和位
置,防止抓斗与墙壁碰撞,造成抓斗损坏;同时也要控制抓斗在
投料口的停止位置,保证能准确的把垃圾投入料斗。
ABB 解决方案
此垃圾吊分为三个机构:提升,大车,小车。分别采用ABB 的
ACS800 变频器。具体如下:
提升机构(110kW):ACS800-01-0205-3+P901+D150+E210+
L502+L503+K454+N697
大车机构(15kW):ACS800-01-0020-3+P901+E210+L502+
L503+K454+N816
小车机构(11kW):ACS800-01-0016-3+P901+E210+L502+
L503+K454+N816
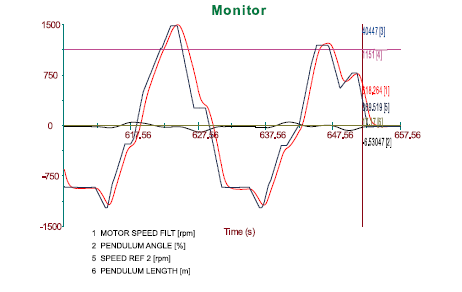
此方案采用提升软件和防摇软件配合使用,通过初始位置测定吊
臂的摆长,通过提升机构的编码器计算实际高度的吊臂长度,来
补偿实际位置高度的摆长,这样来计算实际的摆角,通过控制大、
小车在启动和停止时的加速度,来控制实际的摆角,减小摆动幅
度。见下图实际波形:
同时通过计算,测出大小车最大速度时的停车距离,
然后根据实际情况,安装限位开关,配合PLC控制,防止抓斗碰撞。
项目挑战
• 抓斗在停止时摆动幅度大,不易控制
• 容易和垃圾料场墙壁碰撞,造成抓斗损坏
• 在投料口由于抓斗摆动,造成大量垃圾散落

上位采用西门子的S7-200 PLC,与提升,大、小车通过Profibus
通讯来控制。同时,三个机构的变频器,通过内部的光纤通讯,
来实现内部数据的传输。
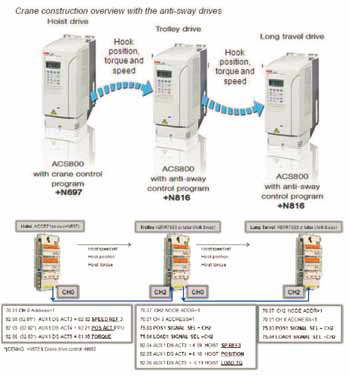
ABB 优势
• 通过提升软件和防摇软件配合使用,改善了抓斗的晃动程度,
降低了抓斗碰撞的风险,提高了投料精度
• 系统简单,其中程序嵌入ABB 变频器中,不需要在PLC 中
进行复杂的运算
• 成本低廉,性价比高,通过ABB 变频器来实现防摇控制,不
需要添加其他的传感器和装置
• 采用ABB 高性能变频器ACS800 系列,产品可靠,维护简单
客户得到的益处
• 减少抓斗因碰撞引起的损坏,减少维修成本
• 提高投料精度,改善生产效率
• 降低故障时间
• 系统简单,客户容易操作和维护
三个机构需要安装制动电阻,编码器,来实现快速启停,同时实
现精确的位置控制。电机的抱闸直接由变频器控制,不需要进入
PLC,简单易控。由于现场电机电缆较长,需要在变频器的输出侧,
安装DU/DT 输出滤波器,实现长距离控制。
- 上一篇:物联网解决方案
- 下一篇:变频器在纺织行业的应用
